汽车天窗导轨自动涂油系统
Automotive Sunroof Guide Automated Greasing System
本案例聚焦于具有复杂剖面结构的精密导轨。系统集成高精度运动控制 **3轴插补运动**,不仅满足了图纸中严格的公差要求,还实现了在复杂长曲面上平稳、均匀的自动化润滑与检测作业。
This case focuses on precision guide rails with complex profile structures. By integrating high-precision **3-axis interpolation motion control**, the system not only meets the strict drawing tolerances but also achieves stable and uniform automated lubrication and inspection on complex, long-curved surfaces.Curve Motion // YYFD PRECISION
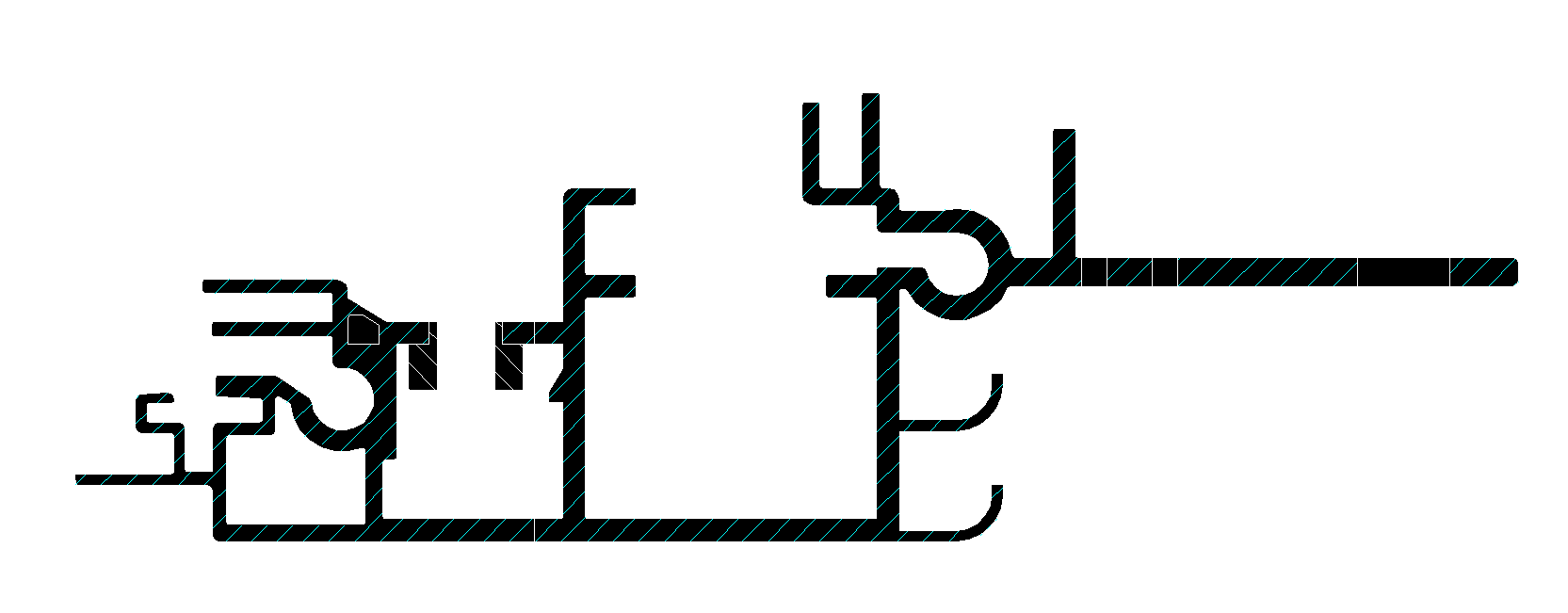
02. 导轨图纸视效分析 / Blueprint Specs
03. 核心运动参数 / Technical Parameters
04. 自动化作业逻辑 / Operation Logic
01. 待机与逻辑预检: 操作员将待处理导轨放置于精密治具后,通过物理按键触发启动序列。系统首先调用底层 I/O 逻辑,实时检索治具在位传感器状态。若未检测到工件或装夹到位信号,系统将立即挂起作业并触发 **“工件未就位”** 显示报警,确保设备运行安全。
Standby & Pre-check Logic: After placing the guide rail into the precision fixture, the operator triggers the start sequence. The system first invokes I/O logic to verify the fixture sensor status. If no workpiece or clamping signal is detected, the operation is suspended with a "Workpiece Not Detected" alarm to ensure safety.
02. 视觉特征检索与寻位: 预检通过后,高分辨率 CCD 工业相机快速移动至预设特征区进行抓拍。视觉算法(Vision Engine)通过提取图纸定义的特征点位(如定位孔特征 [cite: 1]),计算出导轨当前的实际空间坐标。系统随后将视觉偏移量实时补偿至运动控制算法中,实现从“理论位置”到“物理实测位置”的精准映射。
Vision Feature Retrieval: Upon successful pre-check, the high-resolution CCD moves to the predefined area for image capture. The vision engine extracts feature points defined in the drawing [cite: 1] to calculate the actual spatial coordinates. The system then applies real-time vision offsets to the motion control algorithm for precise mapping from theoretical to physical position.
03. 高阶插补与路径喷涂: 在获取精准坐标后,三轴运动模组执行 **S曲线平滑路径** 算法。喷油嘴在复杂空间长曲面上保持恒定的合成速度(Feedrate),配合动态流体控制,确保油脂均匀涂敷于导轨轮廓。整个喷涂轨迹无停顿、无震动,完美适配精密导轨的剖面结构要求。
High-order Interpolation & Spraying: After acquiring precise coordinates, the 3-axis motion module executes S-curve path smoothing. The nozzle maintains a constant feedrate across the complex spatial curves, synchronized with dynamic fluid control to ensure uniform lubrication. The entire trajectory is seamless and vibration-free, matching the rail's profile requirements.
05. 效能总结 / Final Stats
该自动化系统通过精准映射图纸物理特征,将复杂的空间运动转化为可控的数字轨迹。在长距离曲面作业中,系统有效解决了运动末端抖动与流体延迟补偿问题,实现了高一致性的自动化喷涂工艺流程。
The system effectively maps physical features to digital trajectories, resolving end-effector vibration and fluid delay compensation on long curved surfaces. This ensures a highly consistent and automated lubrication workflow.